Posts
95Following
12Followers
139Pavel Pisa
ppisa
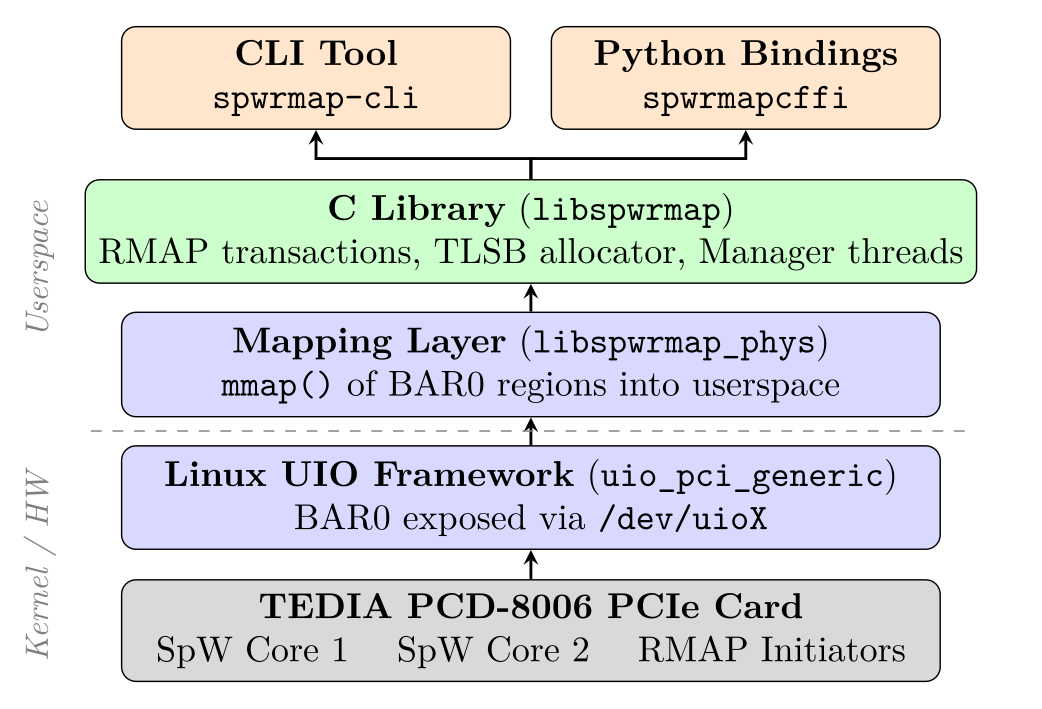
The #SpaceWire ( #satellite oriented wired communication standard) #OpenSource #GNU/ #Linux software support (C library, CLI, Python) for Remote Memory Access Protocol ( #RMAP ) initiator and target realized by STAR-Dundee RMAP IP Cores integrated into custom variant of TEDIA PCD-8006 PCIe expansion card developed by Kyaw Htet Lin at #CVUT #CVUTFEL and his related thesis have been published.
The project page https://gitlab.fel.cvut.cz/otrees/spacewire/spw-pcie-tedia, Wiki, Thesis PDF, Presentation PDF and complete record with review reports https://dspace.cvut.cz/entities/publication/490357d1-8609-414e-91ad-87d4cc0e9b7e.
Longer term plan is to continue with support of more SpW IP cores, #RTEMS and #Zynq and #BeagleV/ #BeagleVFire with potential to be used even for space qualified #PolarFire #SoC.
 0
0
 2
2
 2
2
Pavel Pisa
ppisaThe #cvut #cvutfel OTREES booth at InstallFest 2026 #InstallFest There are #Linux and #NuttX running on x86 PC, RISC-V and ARM. The #QtRvSim simulator is running on x86 and RISC-V Milk-V Pioneer. We have there APO course students semester projects running on MZ_APO. #pysimCoder on the screen as well. The NuttX introductory workshop has been visited by many people. All STM32L476RG based NUCLEO-L476RG kit graciously provided by STM and ETC - Embedded Technology Club.
 0
0
5
0
0
5
Pavel Pisa
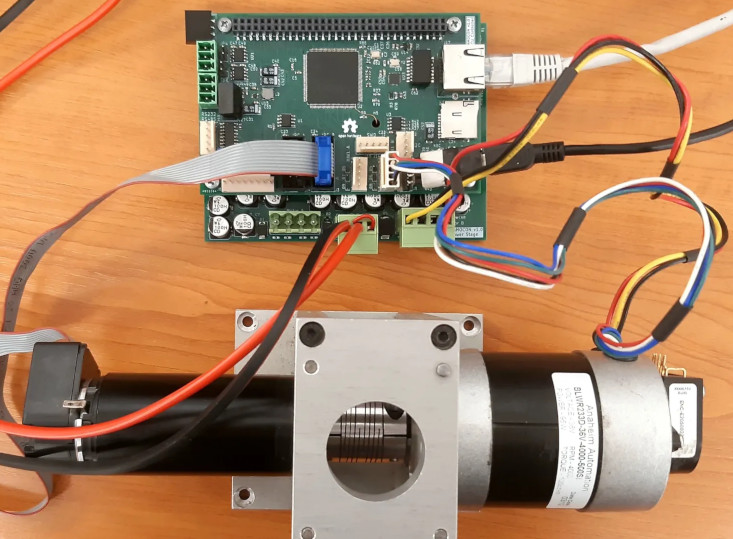
ppisaThe article Design of Prototyping Control Unit for BLDC/PMSM Drives and Piezoelectric Actuators documenting our work on #NuttX #RTOS and #pysimCoder has been published. It documents SaMoCon Open HW and SW motion control platform as well.
We have submitted another related presentation to the Apache Community Over Code 2026 in Glasgow, from October 10 to 15. The NuttX call for presentations is still open for this event.
We hope to be available on Open Source Summit Europe in Prague in October, if the price bar/access rules allow that to our students and us, and we will be available (for sure) at #LinuxDays in Prague, which is (in a contrast) a really freely accessible community organized event in Prague with long history, and this year exactly before @linuxplumbersconf and Open Source Summit Europe
 1
1
3
1
1
3
Pavel Pisa
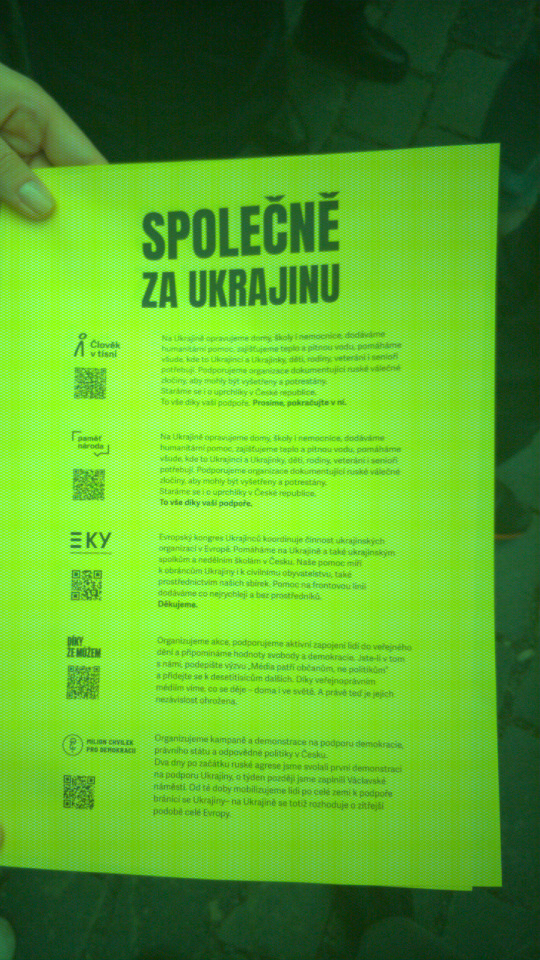
ppisa@Pavel Machek has rebased his #libcamera AutoFocus experimental branch above mainline v0.7.0 tag during @okias organized 6th #MobileLinux Hackday yesterday (thanks to #SUSE for hosting), and I have built it on my #oneplus6 #Qualcomm #sdm845 phone running my build of 6.19.0-rc4-next-20260106-sdm845-gdc7b19cffd9e kernel and #mobian. Then I have tested it with Pavel’s mcam and, probably the first time ever, with Gnome/Phosh snapshot application with a complete pipewire-libcamera stack. The simple SW AF prototype has been enabled by the addition of - Af: line into /usr/share/libcamera/ipa/simple/uncalibrated.yam. On the occasion, I had the chance to test the result to document an actual event: when the president of the Czech Republic, Petr Pavel, spoke at the #Ukraine Support meeting in #Prague Old Town Square today. The autofocus algorithm is quite unstable, periodically seeking a sharp image while the view is blurred in between. Same for the uncalibrated colors. But that could/should be solved in the longer perspective, see FOSDEM talk1 and talk2. But in general, the day when we can run at least older devices under real user control is yet closer. It depends now on @EUCommission whether the future is like 1984 or not for new devices. If it insists on Chat Control, which requires eliminating user control over what software runs on the device and supports rhetoric of sideloading for user control and even own builds of application installing, then the governments and corporations controlled botnet would be abused by mighty ones to control society as a whole. Back to today’s photos and the demonstration of goodwill to help the attacked neighborhood country to survive the imperial war. The original 1080p resolution photo with far focus is there and the short distance shot to the paper there. Both were taken by an IMX519 camera connected to MIPI C-phy.
{kind=link}
{kind=link}

 2
9
16
2
9
16
Pavel Pisa
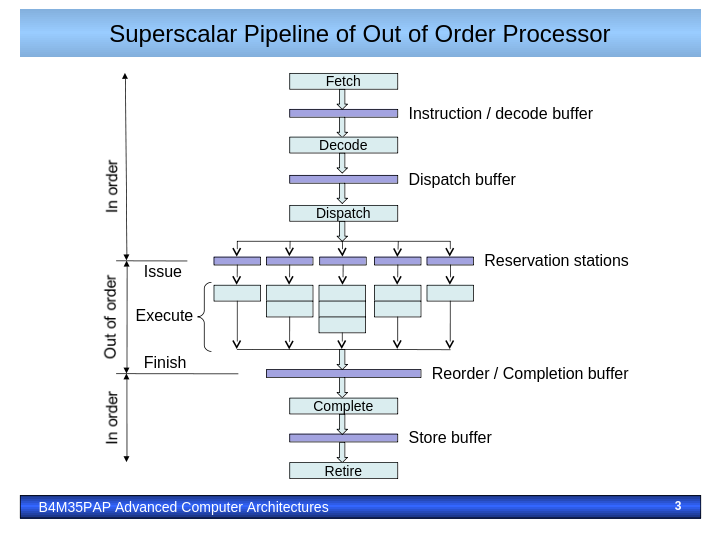
ppisa#CVUTFEL ( #CVUT FEE) Advanced Computer Architecture ( #comparch) course recodings of the first five lectures are published at #VHSky.cz. Czech language recordings from the 2021 round are available as well. The B4M35PAP course builds on the knowledge from the introductory #comparch B35APO course (recordings). Each student builds their own CPU design (tools and ISA are open). The #QtRvSim #RISCV educational simulator is provided for inspiration (online version and The Czech Technical University #comparch related courses guidepost https://comparch.edu.cvut.cz/).
P.S.: Help with tooling for transcribing the lectures in my Czenglish dialect into English subtitles would be appreciated, as well as all other forms of feedback. For the introductory course, we provide reusable LaTeX sources (CC-BY-SA license) that are open to pull requests.
 0
4
8
0
4
8
Pavel Pisa
ppisaApache #NuttX International Workshop 2025 will be held on this Thursday and Friday (16-17th October 2025) https://events.nuttx.apache.org/ It will be accessible on site (Costa Rica - home location of original author, Gregory Nutt) and online. The NuttX RTOS is POSIX based alternative for processor systems and MCUs where Linux kernel does not fit. But thanks to following POSIX and Linux principles it allows writing applications (with some care) which are easily portable between GNU/Linux, NuttX, RTEMS and other real POSIX alternatives. The list of supported platforms is extensive. The #PX4 Autopilot project which is part of vendor-neutral https://dronecode.org/ operating under #Linuxfoundation umbrella. The system is used in lot of fitness tracker, some smartwatches, Sony earbuds, cameras on the Moon, industrial and automotive applications.
 0
2
3
0
2
3
Pavel Pisa
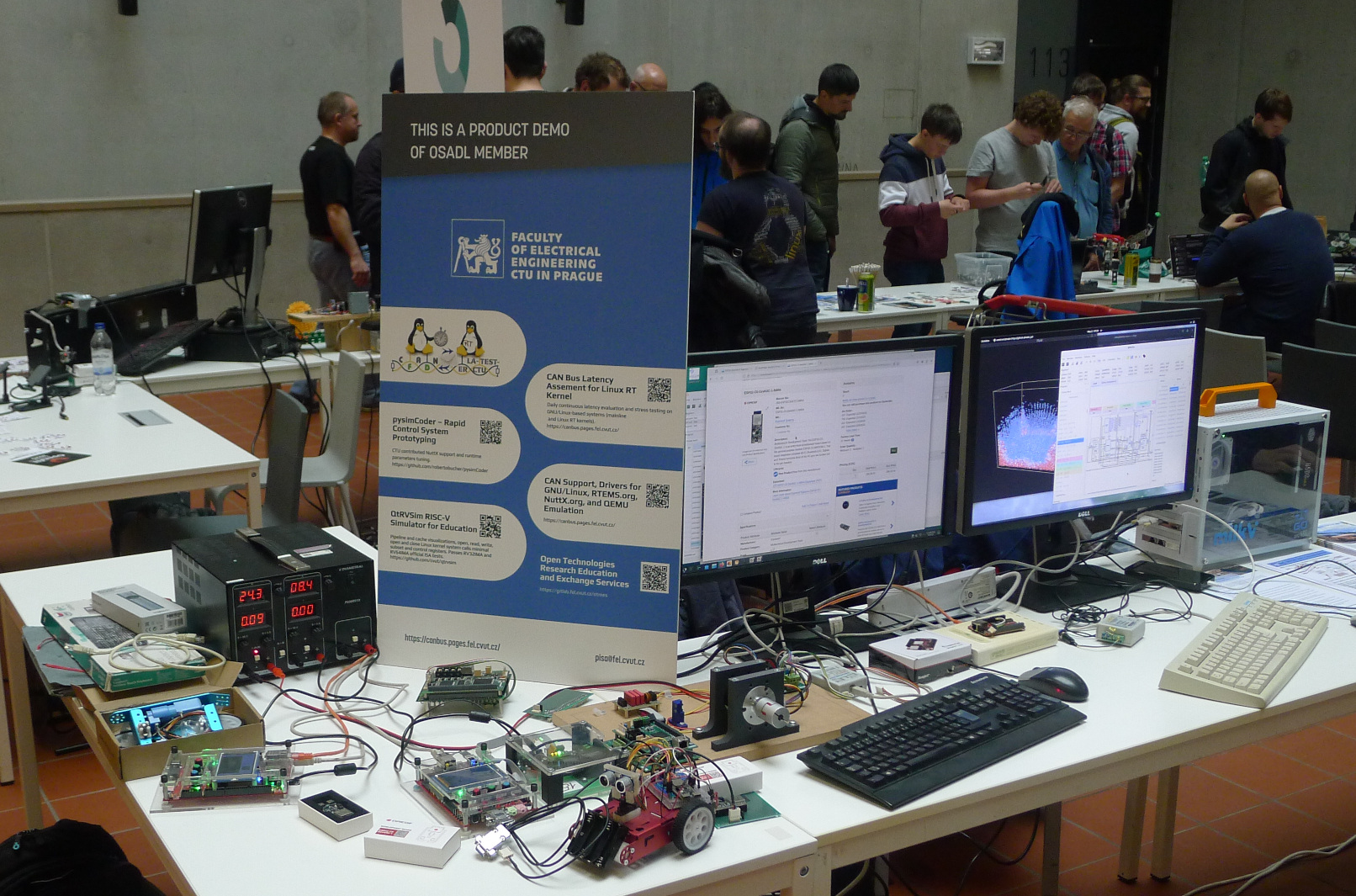
ppisaOTREES #cvut booth at #LinuxDays 2025 presenting our CAN/CAN FD projects for #Linux, #NuttX, #FPGA and #RTEMS. SaMoCon motion control platform driven by pysimCoder rapid prototyping solution for #NuttX with online monitoring and parameters tuning and update uploads through silicon-heaven and NXboot integrated in the frame of Štěpán Pressl’s #GSoC 2025 (will be presented in detail on NuttX Workshop October 16 and 17). More on the booth: #Espressif based kits running NuttX (ICE-V Wireless, see our PMSM project, #ESP32C6 with M-bot platform), AMD/Xilinx Zynq MZ_APO running Linux and #RTEMS, PolarFire SoC, Milk-V Pioneer 64 core 64-bit #RISCV system running #QtRvSim (for CompArch education), #CHROMuLAN data acquisition over uLAN driver, LX_RoCoN system used for ESA projects and lot more to see at our booth.
 1
4
8
1
4
8
Pavel Pisa
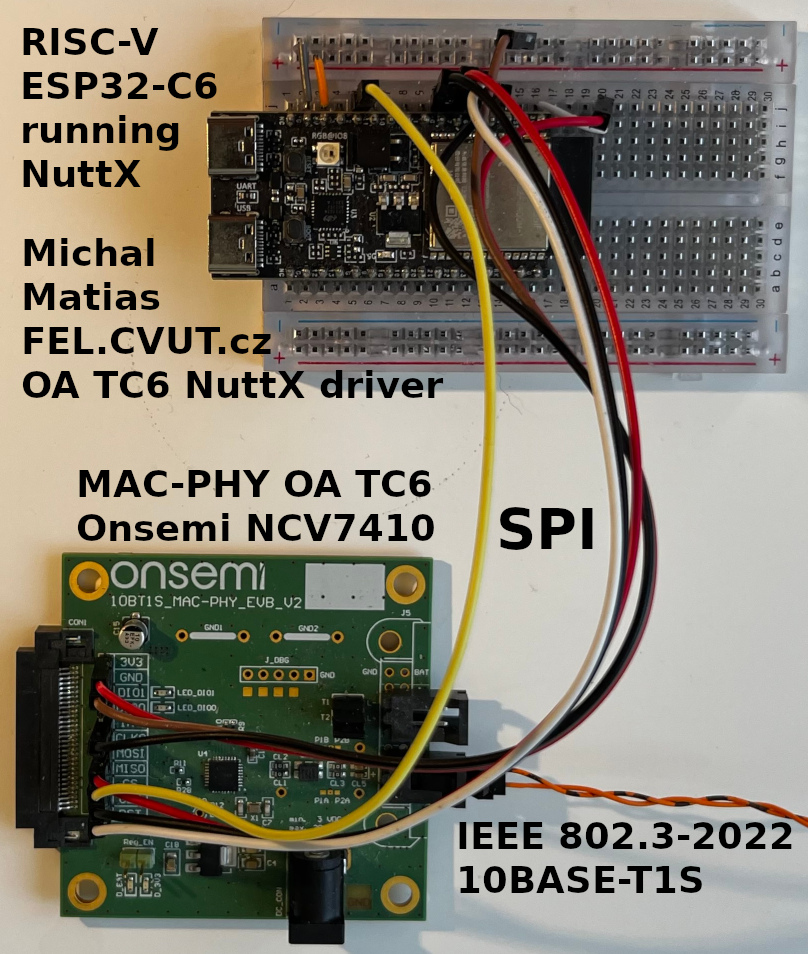
ppisa#NuttX Support for IEEE 802.3-2022 10BASE-T1S/L #Ethernet using Open Aliance SPI MAC-PHYs implemented by Michal Matias from #CVUT in frame of #GSoC2025 has been fully merged into NuttX mainline. The common part resides at drivers/net/oa_tc6. #ESP32C6 mapping and mapping for SAVM71-Xplained Ultra are good examples for straightforward extension to other MCU and board NuttX SPI interfaces. The accompanying plcatool for Physical Layer Collision Avoidance parameters configuration matching OA-TC14 specification is another contribution.
 1
5
7
1
5
7
Pavel Pisa
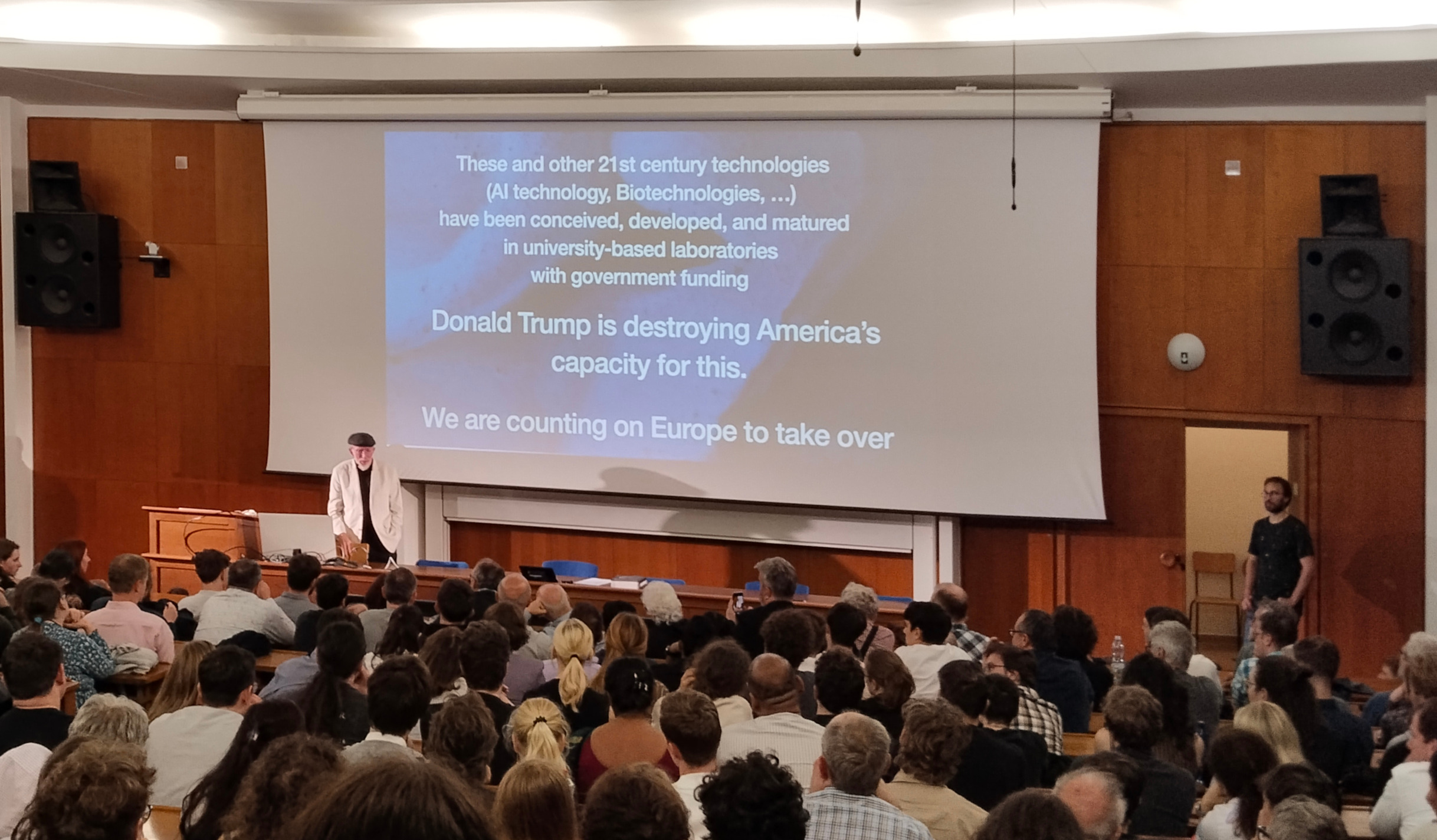
ppisaProf. Kip Thorne even presented 43 years of history leading to the proving of gravitation waves by the Laser Interferometer Gravitational-Wave Observatory (LIGO). He has documented how this has been possible even thanks to cooperation with scientists in Prague and the Soviet Union who have been forced to withstand Stalinism, Soviet occupation of Czech Republic in 1968 ending the Prague Spring, making another obstacle for cooperation, etc. His last slide was less optimistic when compared with Prof. J. Podolský outlook ( Gravitační vlny po 10 letech, a co bude dál?) for Einstein Telescope, VIRGO, LISA, and more bright future based on cooperation of the governments, funding, and scientists worldwide.
 0
0
2
0
0
2
Pavel Pisa
ppisaKip Thorne‘s lecture Quantum Fluctuations in our Universe’s Warped Side presentation at Jiří Bičák Memorial Conference 2025 organized by Charles University Faculty of Mathematics and Physics and Czech Academy of Sciences recordings are available https://youtu.be/To-vVkHHyXk
 1
1
0
1
1
0
Pavel Pisa
ppisaThe new book how to build #riscv processor for #comparch courses is on the horizon (ETA later H2 2025) RISC-V System-on-Chip Design by D. Harris, J. Stine, R. Thompson, S. Harris. It has been presented at the RISC-V International Academic and Training SIG meeting. The recording of the session is available on YouTube https://youtu.be/Qyq5nHUDt4g The related configurable RV32I to RV64IMAFDCB core and Wally SoC sources https://github.com/openhwgroup/cvw
 0
3
5
0
3
5
Pavel Pisa
ppisaThe #QEMU on the Linux host emulation of CAN/CAN FD bus for #nuttx presented in the article Host-Based Development with Apache NuttX – CAN Network Simulation by Mateusz Szafoni is using lot of the components from our #canbus list https://canbus.pages.fel.cvut.cz/. I have even prepared CTU CAN FD QEMU emulation variant for SoCs without PCI/PCIe bus on the branch net-can-ctucanfd-platform and my student, Matyáš Bobek has just finished his thesis adding iMX6 FlexCAN emulation into QEMU, code is available on the flexcan branch of his QEMU repository.
 1
1
3
1
1
3
Pavel Pisa
ppisaIf you want to learn #RiscV basic principles yourself or use it in your computer architectures #comparch basic classes, then you can use our really open and fully shared resources, no registration required for experimenting online https://comparch.edu.cvut.cz/, downloading #QtRvSim packages for all major desktop operating systems #linux, #macos, #mswidows and obtaining lectures with the sources https://cw.fel.cvut.cz/wiki/courses/b35apo/en/lectures/start and recordings on YouTube and even advertisement-free community PeerTube instance VHSky.cz. We offer even online training and and competition site https://comparch.edu.cvut.cz/online-tools/webeval/. In this case, we store SHA1 of your e-mail only for purpose to allow participants to reset their password. So again we do not intend and even cannot use your registration for advertisement for paid courses etc.
 1
0
2
1
0
2
Pavel Pisa
ppisaThe direct link to the #RiscV International article
High RISC, High Reward: RISC-V at 15
https://riscv.org/riscv-news/2025/05/risc-v-15-years/
 1
0
0
1
0
0
Pavel Pisa
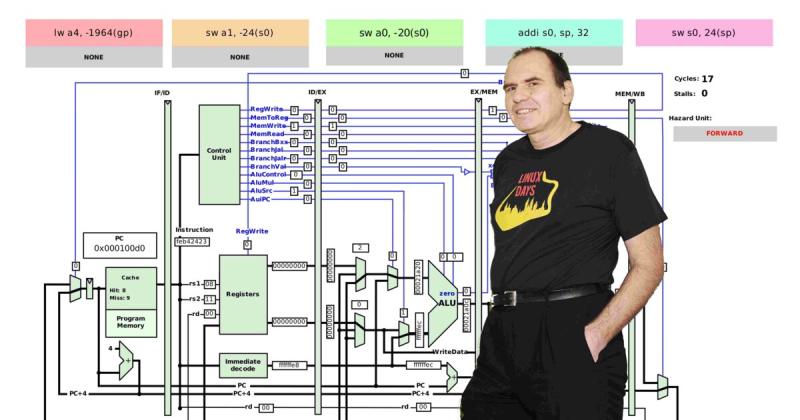
ppisaThe B35APO Computer Architectures course based on #riscv and our #qtrvsim simulator reached new (re)usability level, updated slides in the LaTeX Beamer format for lecture 1 to 10 are translated to English, PDF, CC-BY-SA Slide Sources at #cvut FEE GitLab and on GitHub. The feedback, corrections, suggestion, reuse and cooperation are welcomed. The lectures recording are available on community driven PeerTube server https://vhsky.cz/w/p/8Ejstt3Tfh8mWGcjQcEL2S and CTU FEE B35APO YouTube List. The online site with links to more related courses and on-line QtRvSim WASM application https://comparch.edu.cvut.cz/ allows even online evaluation of simple #riscv assembly and C exercises.
 2
6
10
2
6
10
Pavel Pisa
ppisaOur RTEMS CAN API with CAN FD and priority class queues (result of Michal Lenc’s thesis) has been accepted into RTEMS.org mainline. The related article Scheduling of CAN Frame Transmission when Multiple FIFOs with Assigned Priorities Are Used in RTOS Drivers was presented at International CAN Conference 2024. The maximal gateway latency under load with CTU CAN FD IP core on Zynq (MZ_APO) is under 65 µsec. Development of two more controller drivers is under development and we hope to find some GSoC participants to support even more hardware as well. #canbus #realtime
 1
2
2
1
2
2
Pavel Pisa
ppisaThe recording of my talk about RT_PREEMPT history and its use in our projects is available on the talk page. I have tried to put a complete view and information into the talk, and due to speed and my English, the presentation is far from ideal. I have probably thought about our initial 2.6.x kernel-based RT_PREEMPT projects when I said version 2.12 and 2.13 instead of 6.12 and 6.13. But I think that slides are valuable at least. More talks and slides mainly about the use of GNU/Linux and other RTOSes for the control intended for enthusiasts, students and even experts are available at https://gitlab.fel.cvut.cz/otrees/org/-/wikis/knowbase
 0
2
3
0
2
3
Pavel Pisa
ppisaI will talk about #realtime Linux kernel support, applications and history at #FOSDEM 2025 based on our experience at #CVUTFEL and my company for robotics, automotive communication ( #CANbus ), etc. The talk is based on my last year Czech language talk for the local community (Slides in English) reporting about PREEMPT_RT mainlining. Discussion and suggestions for slide fixes/extensions are welcomed as my talk has been accepted as no other better has been offered by more knowledgeable developers.
 1
11
27
1
11
27
Pavel Pisa
ppisaThere are slides about the PREEMP_RT evolution based on my followup, use and experiments with GNU/Linux in #realtime projects from time about 2.6.18 kernel version - Linux RT Patches Mainlining – Submission Wrapped in the Gold. The talk has been presented on OpenAlt 2024 conference. There is recording in Czech language. If there is interest, I can prepare presentation in English or I am open to provide my photos and materials from 20 years history if somebody wants to prepare better presentation. I have prepared more RT and #osadl RT testing related articles usually with English text but often witch Czech language recording for local community. The list is there https://gitlab.fel.cvut.cz/otrees/org/-/wikis/knowbase.
 0
3
3
0
3
3
Pavel Pisa
ppisa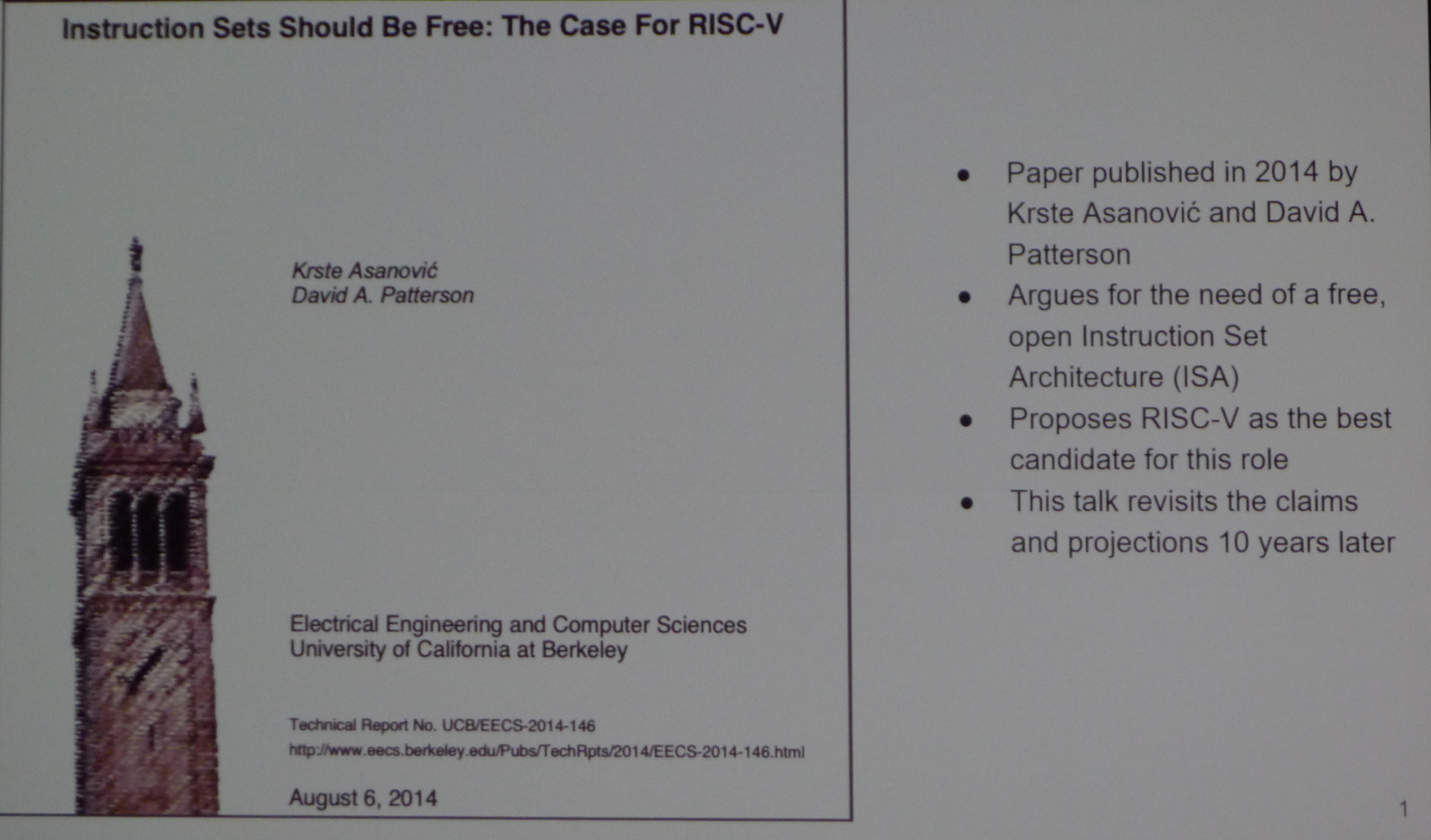 0
1
1
0
1
1